BVR&MT – Những mảng rác khổng lồ trôi nổi trên các đại dương trên thế giới chỉ là bề nổi của tảng băng, số lượng rác còn nhiều hơn đang nằm dưới đáy biển. Dự án SeaClear do Liên minh châu Âu tài trợ nhằm mục đích sử dụng robot tự động để thu thập phần lớn số rác đó.

Có khoảng 86 triệu tấn nhựa đã trôi xuống các đại dương mỗi năm, với những hậu quả tàn khốc đối với sinh vật biển, thiên nhiên và cuối cùng là đối với con người chúng ta. Khoảng 90% lượng rác này nằm dưới đáy biển.
Ô nhiễm biển là một trong những vấn nạn toàn cầu nghiêm trọng nhất. Nó ảnh hưởng đến môi trường, kinh tế, an ninh, sức khỏe và văn hóa. Nhựa không dễ bị phân hủy, vì vậy chúng có khả năng tồn tại trong biển hàng trăm năm.
Các nghiên cứu dự báo sản lượng nhựa sẽ tăng gấp bốn lần vào năm 2050. Theo Diễn đàn Kinh tế Thế giới WEF, tỷ lệ nhựa trên cá vào năm 2014 là 1/5, và đến năm 2050 có thể có nhiều rác thải nhựa dưới biển nhiều ngang bằng với cá.
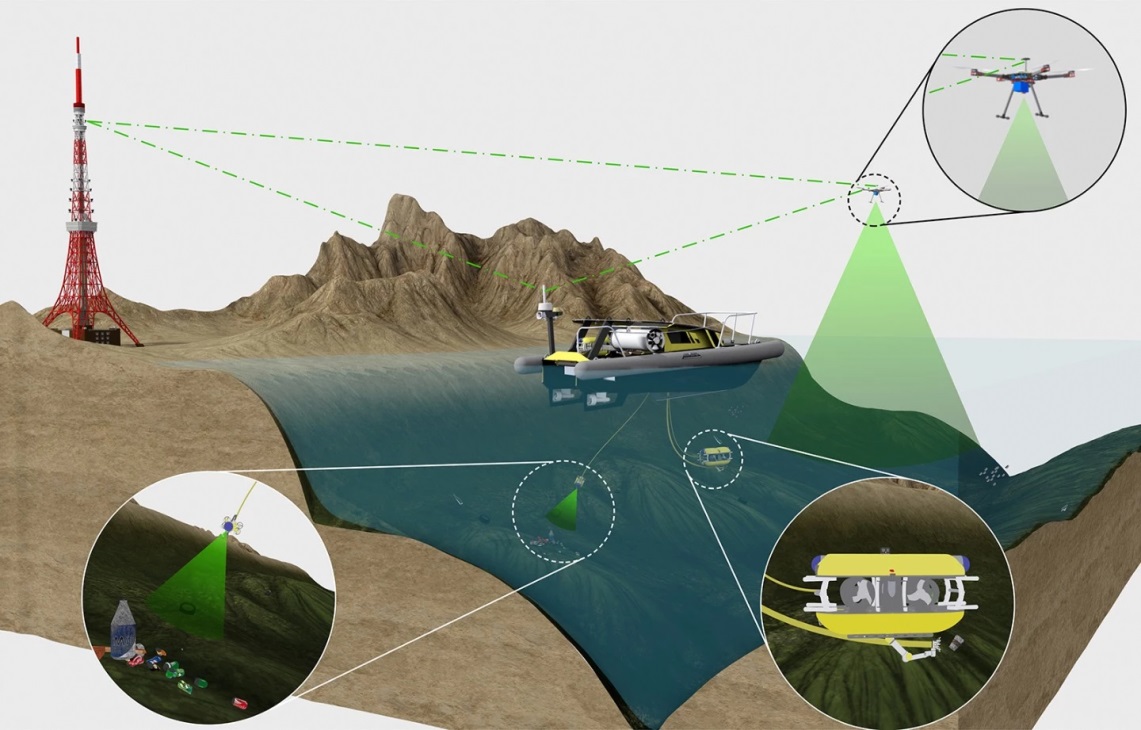
Chúng ta sẽ gặp khó khăn lớn nếu không hành động từ bây giờ, vì vậy Dự án SeaClear đã ra đời. Về cơ bản, hệ thống nhặt rác dưới đại dương bao gồm bốn phương tiện: một máy bay không người lái, hai robot điều khiển từ xa dưới nước (ROV) và một tàu mặt nước không người lái đóng vai trò như một tàu mẹ. Hai ROV sẽ được cung cấp điện từ tàu mẹ thông qua dây cáp, trên tàu mẹ cũng sẽ sử dụng một máy tính tích hợp để xử lý dữ liệu được truyền về.
Hệ thống này sẽ được triển khai chủ yếu ở các khu vực ven biển, vì đó là nơi phần lớn rác từ các con sông đi vào đại dương.

Ban đầu, máy bay không người lái và một trong hai ROV được sử dụng để phát hiện rác từ các dấu hiệu trên bề mặt và trong cột nước tương ứng. Nếu rác có mặt ở cả hai dấu hiệu này trên mặt biển, thì rất có thể cũng có nhiều rác dưới đáy biển ở vị trí đó.
Từ suy luận đó, ROV thứ hai sẽ di chuyển đến và đi dọc theo đáy biển, sử dụng một bộ kẹp và thiết bị hút được thiết kế riêng để thu gom rác thải. Số rác này sẽ được đưa trở lại tàu mẹ và được xử lý trong thùng trung tâm.
Các thuật toán dựa trên trí tuệ nhân tạo sẽ được sử dụng để giúp máy bay không người lái và ROV đầu tiên phân biệt giữa rác và động vật biển. Các thuật toán này cũng sẽ cho phép ROV thứ hai phân biệt giữa rác và san hô hoặc các cấu trúc tự nhiên khác.

Một phiên bản nguyên mẫu của SeaClear đã được thử nghiệm vào mùa xuân này ở độ sâu từ 20 đến 30 mét tại cảng Hamburg, Đức và dọc theo bờ biển Dubrovnik, Croatia. Những địa điểm đó được chọn vì chúng khá khác biệt với nhau. Cảng là nơi nhiều máy móc công nghiệp, đông đúc và nước có nhiều phù sa, trong khi bờ biển Croatia yên bình hơn, nước trong và hướng đến khách du lịch.
Thạc sĩ Cosmin Delea, quản lý dự án cho biết, nước ở cảng Hamburg rất khó phân tích vì độ đục và tầm nhìn thấp. Hơn nữa, hiện nay chưa có thống kê rõ ràng về chủng loại và lượng rác thải dưới nước tại khu vực cảng.
“Ở Hamburg, chúng tôi đang cố gắng kết hợp dữ liệu từ các cảm biến khác nhau khi lập bản đồ thảm rác biển để đánh giá loại rác dưới biển nào sẽ được tìm thấy ở những vùng nước này. Chúng tôi đang sử dụng chủ yếu cảm biến âm thanh vì tầm nhìn hạn chế”, anh Delea nói.

Còn ở khu du lịch biển Dubrovnik, nhóm dự án không thể ngăn cản sự hiếu kỳ của người dân khi họ tiếp cận các phương tiện nhặt rác. “Vì thế, tại Dubrovnik, chúng tôi sẽ lắp đặt các cơ chế an toàn bổ sung trên máy bay không người lái, với một số hỗ trợ từ các cảm biến trên tàu mẹ. Mục tiêu là bảo đảm an toàn và ngăn ngừa va chạm”, anh Delea cho biết. Dự án sẽ tiếp tục thử nghiệm ở Dubrovnik vào cuối mùa hè.
Các đối tác chung tay phát triển dự án này bao gồm Trung tâm Dịch vụ Logistics Fraunhofer của Đức; trường Đại học Kỹ thuật Munich, SubSea Tech Marseille; Cảng vụ Hamburg; và Cơ quan Phát triển DUNEA Dubrovnik.
Trước đó, năm 2019, Ocean Cleanup, một tổ chức phi lợi nhuận của Hà Lan đã thiết kế thành công hệ thống khổng lồ nhằm thu gom rác thải nhựa trên bề mặt đại dương.


